メルマガ登録
-
テーマから探す
-
技術から探す
-
業界・事例から探す
-
関連トレンドから探す
テーマから探す
技術から探す
業界・事例から探す
関連トレンドから探す
※TensorFlowとは2015年11月9日にオープンソース化されたGoogleの機械学習ライブラリです。
本ブログでは、実際のTensorFlowの使い方を連載方式でご紹介しています。
皆様こんにちはテクノロジー&ソフトウェア開発本部の佐藤貴海です。
今回のブログでは「4-1. Convolutional Neural Networks」についてご紹介します。
https://www.tensorflow.org/versions/master/tutorials/deep_cnn/index.html
今回から、いよいよ応用に寄った話に入っていきます。
Convolutional Neural Networks(以下CNN)とは、以前簡単にご紹介した畳み込みニューラルネットワークのことです。
使用するデータはMNSITではなくCIFAR-10と呼ばれる、
10クラスに分類された32×32の画像が60,000個(学習用: 50,000個, テスト用: 10,000個)あるデータセットです。
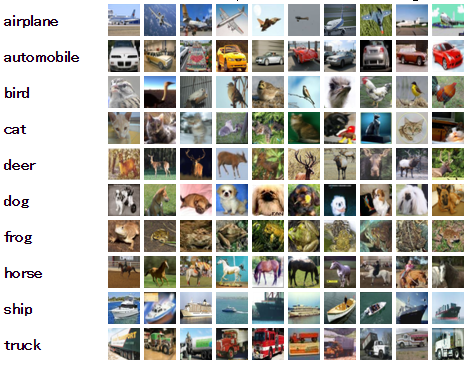
CIFAR-10 and CIFAR-100 datasets
基本的にやっていることはMNISTと変わりませんが、より実践的な内容となっており、精度を向上させる細かい工夫が各所にあるので、いろいろ紹介していきたいと思います。
各ファイルの役割は、以下のようになっています。
We hope that this tutorial provides a launch point for building larger CNNs for vision tasks on TensorFlow.
とのことなので、各アプリで”cifar.py”のようなものを設計・実装することが推奨されていると思われます。
この後は、以下の流れに沿って進めます。
このチュートリアルでは、cifar.distorted_inputs()で、入力データを読み込むことができます。大筋の流れはMNISTの場合と同じですが、より実践に則したチュートリアルとなっており、以下の操作を行い学習データを増やしています。
なんと、この操作が全てTensorFlowのメソッドを呼び出すだけで、実行できるようになっています。
ディープラーニングは、画像認識の分野で発展したこともあり、この辺りの操作はすでにライブラリレベルでサポートされています。
さらっと記載しましたが、この分野についての手法提案からライブラリに載るまでの速度は、ハッキリ言って次元が異なります。素人がどうこうできるレベルを超えているので、ここは素直に恩恵にあずかりましょう。
次に、cifar.inference()でモデルを構築します。
CNNについては、前回紹介しましたので、概要を軽く復習する程度にします。
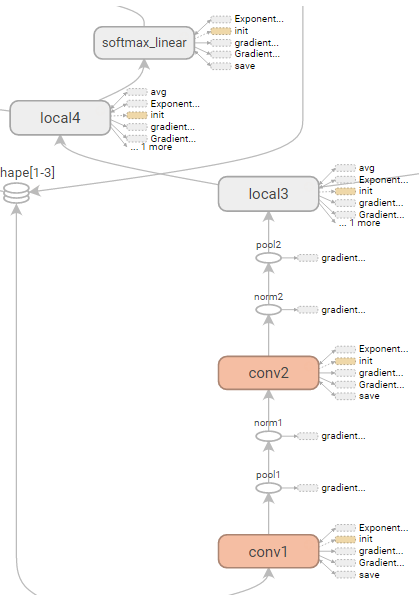
conv1, pool1, norm1, conv2, norm2, pool2, local3, local4, softmax_linearの10層で構成されています。
norm層は初出で、Local Response Normalization (LRN)層のことです。ReLU層の出力の正規化に用いられる操作で、doc stringによると以下の実装となってます
Local Response Normalization.
The 4-D `input` tensor is treated as a 3-D array of 1-D vectors (along the lastdimension), and each vector is normalized independently. Within a given vector, each component is divided by the weighted, squared sum of inputs within `depth_radius`. In detail,
sqr_sum[a, b, c, d] =
sum(input[a, b, c, d – depth_radius : d + depth_radius + 1] ** 2)
output = input / (bias + alpha * sqr_sum ** beta)For details, see [Krizhevsky et al., ImageNet classification with deep
(http://papers.nips.cc/paper/4824-imagenet-classification-with-deep-convolutional-neural-networks).
convolutional neural networks (NIPS 2012)]
詳しくは、上記の[Krizhevsky+ 2012]の3.3節を参照ください。
あとは、日本語よりもコードを見たほうが早いので、引用します。
def inference(images):
"""Build the CIFAR-10 model.
Args:
images: Images returned from distorted_inputs() or inputs().
Returns:
Logits.
"""
# We instantiate all variables using tf.get_variable() instead of
# tf.Variable() in order to share variables across multiple GPU training runs.
# If we only ran this model on a single GPU, we could simplify this function
# by replacing all instances of tf.get_variable() with tf.Variable().
#
# conv1
with tf.variable_scope('conv1') as scope:
kernel = _variable_with_weight_decay('weights', shape=[5, 5, 3, 64],
stddev=1e-4, wd=0.0)
conv = tf.nn.conv2d(images, kernel, [1, 1, 1, 1], padding='SAME')
biases = _variable_on_cpu('biases', [64], tf.constant_initializer(0.0))
bias = tf.nn.bias_add(conv, biases)
conv1 = tf.nn.relu(bias, name=scope.name)
_activation_summary(conv1)
# pool1
pool1 = tf.nn.max_pool(conv1, ksize=[1, 3, 3, 1], strides=[1, 2, 2, 1],
padding='SAME', name='pool1')
# norm1
norm1 = tf.nn.lrn(pool1, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75,
name='norm1')
# conv2
with tf.variable_scope('conv2') as scope:
kernel = _variable_with_weight_decay('weights', shape=[5, 5, 64, 64],
stddev=1e-4, wd=0.0)
conv = tf.nn.conv2d(norm1, kernel, [1, 1, 1, 1], padding='SAME')
biases = _variable_on_cpu('biases', [64], tf.constant_initializer(0.1))
bias = tf.nn.bias_add(conv, biases)
conv2 = tf.nn.relu(bias, name=scope.name)
_activation_summary(conv2)
# norm2
norm2 = tf.nn.lrn(conv2, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75,
name='norm2')
# pool2
pool2 = tf.nn.max_pool(norm2, ksize=[1, 3, 3, 1],
strides=[1, 2, 2, 1], padding='SAME', name='pool2')
# local3
with tf.variable_scope('local3') as scope:
# Move everything into depth so we can perform a single matrix multiply.
dim = 1
for d in pool2.get_shape()[1:].as_list():
dim *= d
reshape = tf.reshape(pool2, [FLAGS.batch_size, dim])
weights = _variable_with_weight_decay('weights', shape=[dim, 384],
stddev=0.04, wd=0.004)
biases = _variable_on_cpu('biases', [384], tf.constant_initializer(0.1))
local3 = tf.nn.relu_layer(reshape, weights, biases, name=scope.name)
_activation_summary(local3)
# local4
with tf.variable_scope('local4') as scope:
weights = _variable_with_weight_decay('weights', shape=[384, 192],
stddev=0.04, wd=0.004)
biases = _variable_on_cpu('biases', [192], tf.constant_initializer(0.1))
local4 = tf.nn.relu_layer(local3, weights, biases, name=scope.name)
_activation_summary(local4)
# softmax, i.e. softmax(WX + b)
with tf.variable_scope('softmax_linear') as scope:
weights = _variable_with_weight_decay('weights', [192, NUM_CLASSES],
stddev=1/192.0, wd=0.0)
biases = _variable_on_cpu('biases', [NUM_CLASSES],
tf.constant_initializer(0.0))
softmax_linear = tf.nn.xw_plus_b(local4, weights, biases, name=scope.name)
_activation_summary(softmax_linear)
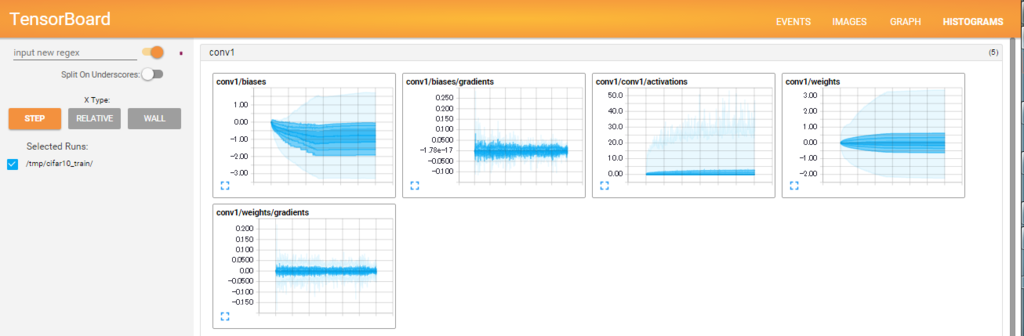
return softmax_linear_activation_summary()で、各層の活性化後の値のヒストグラムと非ゼロ要素数を、サマリに追加しています。
これにより、TensorBoardでより多くの情報を確認することができます。
基本的に、以前ご紹介したMNISTの学習とやっていることは変わりませんが、少し工夫があります。# 10反復毎に標準出力に情報を出力
# 10反復毎に標準出力に情報を出力
if step % 10 == 0:
num_examples_per_step = FLAGS.batch_size
examples_per_sec = num_examples_per_step / duration
sec_per_batch = float(duration)
format_str = ('%s: step %d, loss = %.2f (%.1f examples/sec; %.3f '
'sec/batch)')
print (format_str % (datetime.now(), step, loss_value,
examples_per_sec, sec_per_batch))
# 100反復毎に、TensorBoardにサマリを出力
if step % 100 == 0:
summary_str = sess.run(summary_op)
summary_writer.add_summary(summary_str, step)
# 1000反復毎にモデルを保存
if step % 1000 == 0 or (step + 1) == FLAGS.max_steps:
checkpoint_path = os.path.join(FLAGS.train_dir, 'model.ckpt')
saver.save(sess, checkpoint_path, global_step=step)特に、1000反復ごとにモデルを保存することにより、途中でCtrl+cで止めても学習途中のモデルが得られます。
Deep Neural Network(以下DNN)では、数日以上に渡ってモデルを学習することがあるので、定期的なシリアライズは時間を無駄にしないためにも重要です。
実際に実行したログはこちら
# python cifar10_train.py
>> Downloading cifar-10-binary.tar.gz 100.0%
Succesfully downloaded cifar-10-binary.tar.gz 170052171 bytes.
Filling queue with 20000 CIFAR images before starting to train. This will take a few minutes.
I tensorflow/core/common_runtime/local_device.cc:25] Local device intra op parallelism threads: 12
I tensorflow/core/common_runtime/gpu/gpu_init.cc:88] Found device 0 with properties:
name: Tesla K40c
major: 3 minor: 5 memoryClockRate (GHz) 0.745
pciBusID 0000:02:00.0
Total memory: 11.25GiB
Free memory: 11.15GiB
I tensorflow/core/common_runtime/gpu/gpu_init.cc:88] Found device 1 with properties:
name: Tesla K40c
major: 3 minor: 5 memoryClockRate (GHz) 0.745
pciBusID 0000:01:00.0
Total memory: 11.25GiB
Free memory: 11.15GiB
I tensorflow/core/common_runtime/gpu/gpu_init.cc:112] DMA: 0 1
I tensorflow/core/common_runtime/gpu/gpu_init.cc:122] 0: Y Y
I tensorflow/core/common_runtime/gpu/gpu_init.cc:122] 1: Y Y
I tensorflow/core/common_runtime/gpu/gpu_device.cc:643] Creating TensorFlow device (/gpu:0) -> (device: 0, name: Tesla K40c, pci bus id: 0000:02:00.0)
I tensorflow/core/common_runtime/gpu/gpu_device.cc:643] Creating TensorFlow device (/gpu:1) -> (device: 1, name: Tesla K40c, pci bus id: 0000:01:00.0)
I tensorflow/core/common_runtime/gpu/gpu_region_allocator.cc:47] Setting region size to 11377456333
I tensorflow/core/common_runtime/gpu/gpu_region_allocator.cc:47] Setting region size to 11377448551
I tensorflow/core/common_runtime/local_session.cc:45] Local session inter op parallelism threads: 12
2016-01-11 06:55:11.104789: step 0, loss = 4.68 (4.3 examples/sec; 29.519 sec/batch)
2016-01-11 06:55:13.824070: step 10, loss = 4.66 (554.8 examples/sec; 0.231 sec/batch)
2016-01-11 06:55:16.329406: step 20, loss = 4.64 (535.4 examples/sec; 0.239 sec/batch)
2016-01-11 06:55:18.885229: step 30, loss = 4.61 (516.3 examples/sec; 0.248 sec/batch)
2016-01-11 06:55:21.457211: step 40, loss = 4.60 (516.2 examples/sec; 0.248 sec/batch)
2016-01-11 06:55:23.996590: step 50, loss = 4.59 (520.7 examples/sec; 0.246 sec/batch)
2016-01-11 06:55:26.511654: step 60, loss = 4.57 (497.9 examples/sec; 0.257 sec/batch)
...System | Step Time (sec/batch) | Accuracy
1 Tesla K20m | 0.35-0.60 | ~86% at 60K steps (5 hours)
1 Tesla K40m | 0.25-0.35 | ~86% at 100K steps (4 hours)
ドキュメントによると、4~5時間回すと大体86%の精度が出るとのこと。
sec/batchはブレインパッドの計算機の方が速い。さすがTesla K40c!!
ただし時間の都合上1時間で打ち切り、評価に移ります。
今度はcifar10_eval.pyでモデルを評価していきます。こちらもMNISTの時と流れは同じですが、いくつか工夫があります。
まず、評価関数は、今回tf.nn.in_top_k()を使っています。正解が上位k個の予測の中に含まれる場合、各モデルの出力を正しいものとみなし、自動的にスコアします。
ただし今回はk=1なので、MNISTと最終的には同じ評価となっています。関数が用意されているのでtf.nn.in_top_k()を使用するのが無難でしょう。
さらに大きな工夫としては、評価もThreadingとQueuesを用いて、並列化しているところです。
TensorFlowではThreadingとQueuesを用いた並列計算を容易に行えるよう、tf.Coordinatorとtf.QueueRunnerというクラスが用意されています。
https://www.tensorflow.org/versions/master/how_tos/threading_and_queues/index.html
DNNではバッチを切って学習することや、メモリ空間がCPUとGPU双方にあり通信が必要なことから、キューイングしたいという要望は、多くあります。
特に、GPU側はメモリ空間に限りがあり、またGPUコアの番地の制限もあることから、TensorFlow側で処理をしてくれるのは、非常にありがたい話です。
今回は、実装の細かいところまで追えていないので、以下のチュートリアルの実装を書き写すことが第一手と思われます。
# Coordinatorを用意
coord = tf.train.Coordinator()
try:
# キュー処理用のスレッド用意
threads = []
for qr in tf.get_collection(tf.GraphKeys.QUEUE_RUNNERS):
threads.extend(qr.create_threads(sess, coord=coord, daemon=True,
start=True))
num_iter = int(math.ceil(FLAGS.num_examples / FLAGS.batch_size))
true_count = 0 # Counts the number of correct predictions.
total_sample_count = num_iter * FLAGS.batch_size
# 評価処理を実行
step = 0
while step < num_iter and not coord.should_stop():
predictions = sess.run([top_k_op])
true_count += np.sum(predictions)
step += 1
# ここに同期処理がないので、バッチ内部を並列処理と思われる
# Compute precision @ 1.
precision = true_count / total_sample_count
print('%s: precision @ 1 = %.3f' % (datetime.now(), precision))
summary = tf.Summary()
summary.ParseFromString(sess.run(summary_op))
summary.value.add(tag='Precision @ 1', simple_value=precision)
summary_writer.add_summary(summary, global_step)
except Exception as e: # pylint: disable=broad-except
coord.request_stop(e)
# スレッドの同期
coord.request_stop()
coord.join(threads, stop_grace_period_secs=10)さて、先程のCNNを1時間程度学習した評価をします。結果は・・・79%
あと3時間ぐらい回せば、コレが85%ぐらいになるはず。
余談ですが、cifar10_eval.pyのスクリプトには面白い点があり、デフォルトで5分に1回評価を再実行します。
つまり、1個のプロセスでcifar10_train.pyで学習をしながら、cifar10_eval.pyを眺めて精度が上がって行く様子を楽しむことができます。
「watchコマンドで良いのでは・・・」いう意見もありそうですが、Googleの工夫が見てとれる実装です。
あなたにオススメの記事

2023.12.01
生成AI(ジェネレーティブAI)とは?ChatGPTとの違いや仕組み・種類・活用事例

2023.09.21
DX(デジタルトランスフォーメーション)とは?今さら聞けない意味・定義を分かりやすく解説【2024年最新】

2023.11.24
【現役社員が解説】データサイエンティストとは?仕事内容やAI・DX時代に必要なスキル

2023.09.08
DX事例26選:6つの業界別に紹介~有名企業はどんなDXをやっている?~【2024年最新版】

2023.08.23
LLM(大規模言語モデル)とは?生成AIとの違いや活用事例・課題

2024.03.22
生成AIの評価指標・ベンチマークとそれらに関連する問題点や限界を解説